热门







汽车工程师使用MTi-G测试和提高汽车性能
MTi-G动作捕捉设备为汽车性能的测试和提高提供经济准确的跟踪测量方式

|
法国布杜尔专业赛车场在Nogaro巡回赛中使用了MTi-Gin的生化赛车系列体育原型(LMP2款24小时勒芒汽车)进行比赛分析。通过对MTi-G获取的数据进行后期处理,得出了下列数据:
汽车工程师通常使用高端系统来测试和提高设备性能,这些系统十分准确,但价格昂贵,较为笨重;但使用MTi-G的所得到的测量数据,许多参数的准确性与高端设备相同,价格却仅是高端设备的一小部分,还具有重量轻、功耗低的优势。 测量设置
MTi-G安装在合适的振动阻尼器顶部。采用有效的抗振动装置可以有效地减少MTi-G设备遇到的震动。较大的震动可以影响MTi-G装置的测量精度。 生化赛车LMP2产品性能
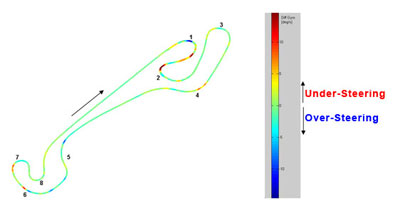
理论 过度转向和转向不足 如果速度除以半径,减去车辆的转率(Gz),也可以计算出DiffGyro参数。DiffGyro参数可以测定出过度转向或转向不足的问题。
图3:过度转向的情况。赛车的转弯速度可以通过陀螺仪速率测出,弯道速度是采用MTi-G设备通过全球定位系统数值计算得出。DiffGyro小于零或陀螺仪转弯速度高于赛道的弯道速度。θ是汽车在重心的滑移角。 滑移角(图3) 轨道半径 加速度和方向属性 结果 从MTi-G数据得出如下结论: 过度转向和转向不足
由这张图可以迅速注意到以下几点: 确定最佳的比赛线路
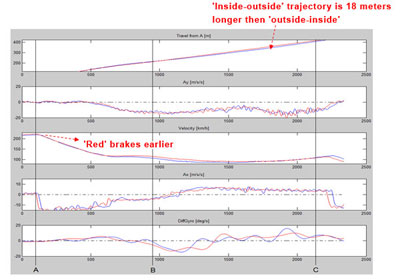
图5显示了数据采集图(从MTi-G数据单独提取),与曲线1轨道上相应的点A、B和C。 X轴显示了A的样本数量(直接与时间有关:样本速率为200Hz)。图5是曲线1加速的平面图,其中司机测试了连续两圈中两个不同的轨迹(“由内到外”和“由外到内”)。
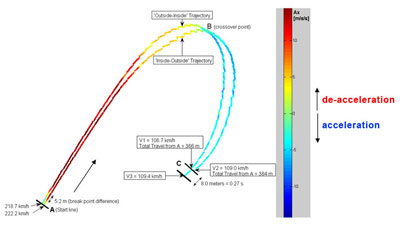
使用MTi-G数据,可以计算出刹车点的精确位置和两个刹车点之间的精确距离:5.2米(“由外到内”轨迹必须提前刹车,首先是为了赶上的弯道内侧,其次是因为A点的进入速度较高)。MTi-G与两个轨迹的对应时间是完全一致的。因此,可以立即推断出,由内到外的线路比由外到内的线路速度更快,因为在同一时间内,司机多行驶了8.0米。如果采用由内到外线路,司机可以节省0.27秒时间。由内到外的线路更像是一个V字型方程式轨迹,曲线内部的第二个轨迹更加平滑。这可以通过计算轨道半径(B点周围)的最低值来判定:37.7米,另一个则为40.4米。 仅从图6所采集到的数据来看,‘内-外’轨道中C点的速度看起来有点高,这是因为它是时间的函数:在C点有一个0.27秒的延迟对应8.0米的路程。所以C点的速度即V3应该是109.4公里/小时,而不是106.7公里/每小时(见图5)。有趣的是,由外到而内的轨迹中,B点的速度加快,从而以更快的109.0公里/小时的速度驶离这条轨迹,这是因为在该轨道的这一部分,赛车有更多的抓地力。现在我们来纵观一下整个转向过程,在由内而外的转向轨道中,‘V’形部分(即在图5中DiffGyro值为负的黑色椭圆曲线部分)是整个行驶过程中速度最快的部分,由此可以推断出,‘V’形部分的初期开始加速,如图5B点速度所示,之后则开始减速。 结论 无论是体积,功耗还是成本,相较于高端测量系统,MTi- G是分析改进赛车应用数据的理想选择。 |



电话:010-50951355 传真:010-50951352 邮箱:sales@souvr.com ;点击查看区域负责人电话
手机:13811546370 / 13720091697 / 13720096040 / 13811548270 /
13811981522 / 18600440988 /13810279720 /13581546145

