热门







核废料处理虚拟仿真培训项目实施

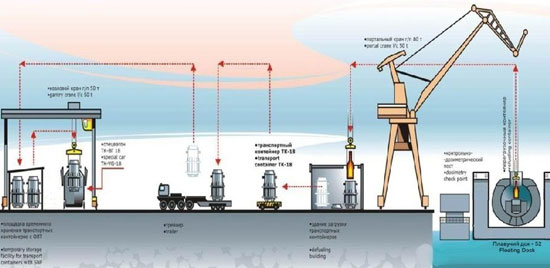
核废料处理虚拟仿真培训系统利用三维虚拟现实技术真实模拟机器人在高辐射强度环境中执行任务,实现对物体的切割、剪切、拾取、搬运等操作,帮助高危行业工作人员熟练操控远端机器人完成核废料的清理工作,降低辐射危险,并创建一种具有可行性的施工解决方案。
系统由场景设置、机器人设置、机器人实训、结果分析四个部分组成。首先,利用虚拟现实技术构建三维可视化辐射源场景,为场景添加辐射源和障碍物。场景布置好后,进入机器人设置界面,工作人员可以任意选择工具头组合,以便实训场景中的机器人使用。同时,系统还可以360度旋转查看机器人。
机器人实训真实模拟了机器人在高辐射强度环境中执行任务,实现对物体的切割、剪切、拾取、搬运等操作。通过任务栏状态,工作人员可以清楚的了解目前任务进行的状态。系统显示了机器人受到的瞬时辐射强度(瞬时强度)、机器人当前所处的状态(警示灯)、机器人所受到的瞬时辐射量(累计辐射)、以及当前瞬时强度下机器人完成任务的剩余时间和实训时间(计时器),作为工作人员实训时的参考信息。
系统会对任务完成情况进行结果显示和分析,以图表和曲线的形式显示出记录的瞬时辐射强度和累积辐射量,为研究人员进行施工提供分析依据。
这一前沿科研领域的研究提供了实验平台,为在虚拟辐射源环境中规划、设计机器人工作路径和工作流程提供了创新型的建设思路。
电话:010-50951355 传真:010-50951352 邮箱:sales@souvr.com ;点击查看区域负责人电话
手机:13811546370 / 13720091697 / 13720096040 / 13811548270 /
13811981522 / 18600440988 /13810279720 /13581546145

